本文旨在从虚拟机使用的角度对照着理解docker容器的实现。
容器化技术也是属于虚拟化的一种,虚拟机的虚拟化不管技术如何实现,使用者角度体验都是类似。
namespace和cgroups
namespace的隔离机制是虚拟化的基础,Linux在chroot的基础上提供了对UTS、IPC、mount、PID、network、User等隔离机制。而cgroups在隔离的基础上,提供了资源的限制和控制功能。
这些基础技术的文章已经有很多,推荐看下左耳朵耗子的,本文只希望从稍微大点的层面把这些概念串起来。
当我们希望虚拟出一个貌似独立的操作系统环境时,都需要哪方面的虚拟化,以及在容器里如何实现的?
独立的用户系统
登录该操作系统需要一个用户,那么不管是root还是非root,都需要一套独立的用户系统。
User namespace可以提供该功能,容器内的用户和外部不会冲突。
独立的主机名
UTS namespace可以提供该隔离功能。
独立的进程树
PID namespace可以提供该隔离功能。
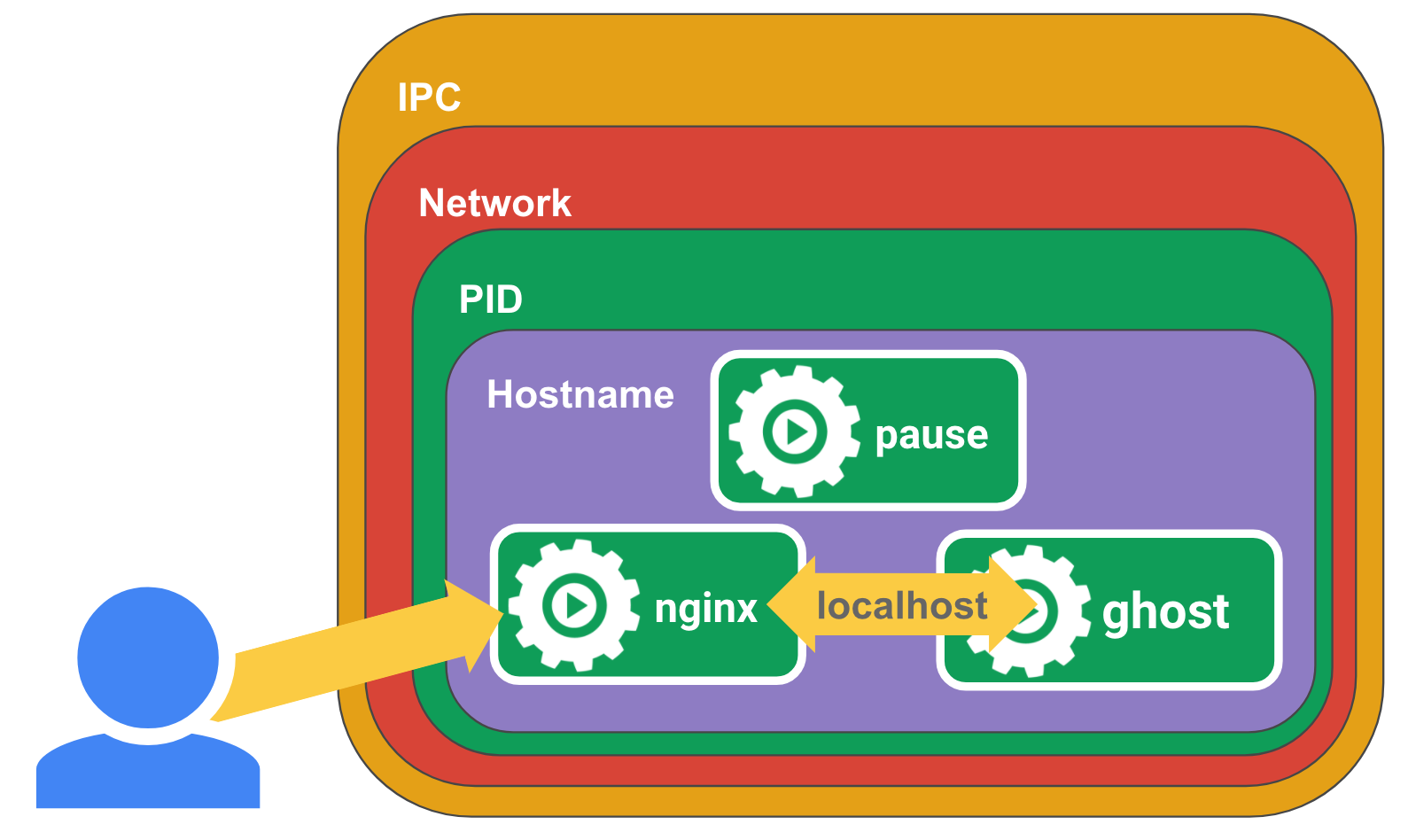
IPC通信
IPC namespace可以提供该隔离功能。
独立的文件系统,可以从镜像启动
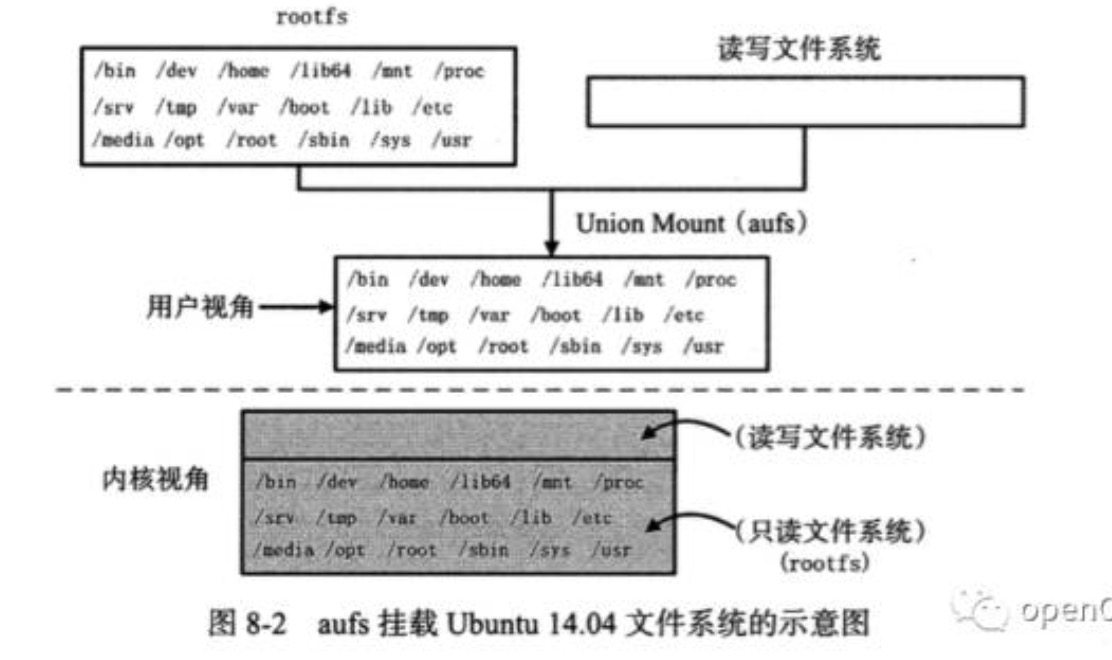
典型的Linux文件系统由bootfs和rootfs组成,bootfs(boot file system)主要包含 bootloader和kernel,bootloader主要是引导加载kernel,当kernel被加载到内存中后 bootfs就被umount了。rootfs (root file system) 包含的就是典型 Linux 系统中的/dev,/proc,/bin,/etc等标准目录和文件。
Mount namespace可以提供该隔离功能(类似于chroot命令),而在docker里用这个功能挂载rootfs,并且和AUFS(也可以是其他的Union 文件系统)一起使用。各种容器里运行的进程不一定需要这么多系统目录,在docker里把原本linux文件系统里的rootfs分为多份,使用AUFS的union mount技术一层一层组合起来,组成read only层,最上层则有write权限,可以由容器中允许的进程修改。
linux镜像的内容和其文件系统一致,有bootfs和rootfs,而docker有自己的启动方式,所以上面的readonly层和readwrite层组合起来就是最终的docker镜像。
独立的网络
和宿主机隔离开,有自己的网络设备和网段。
Network namespace可以提供该隔离功能,网络设备在两个namespace之间是互相看不到的。但也只是隔离,虚拟机中的网络设备模拟正常的linux系统,有许多默认的比如lo设备,还有自己的网卡设备,docker都可以模拟出来。
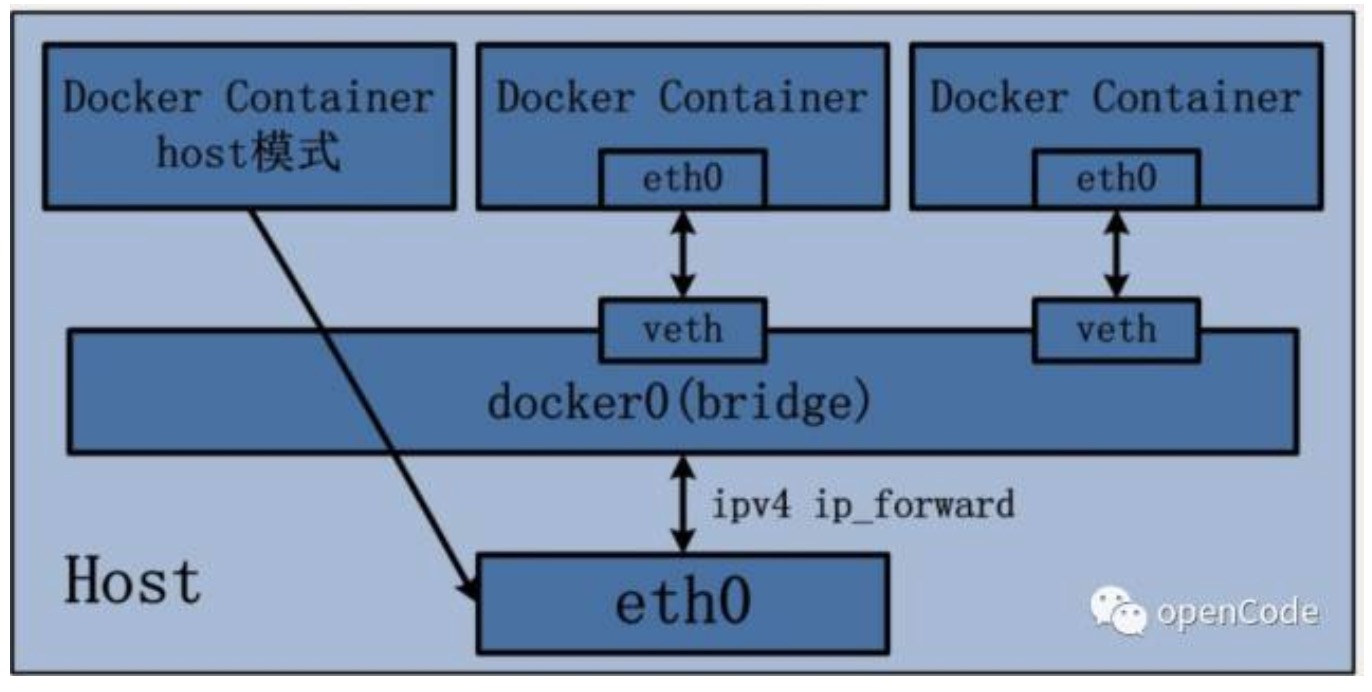
docker有多种网络模式,这里只用下图说明下bridge网络模式。
docker的namespace内创建一个网卡设备,宿主机创建一个bridge设备,通过veth pair讲两者连接起来,则成功将两个network namespace的设备连通。
网络也有自己的安全机制,可以控制数据的进出
有了上面的模拟网络的基础,则可以通过宿主机的iptables来控制网络数据。
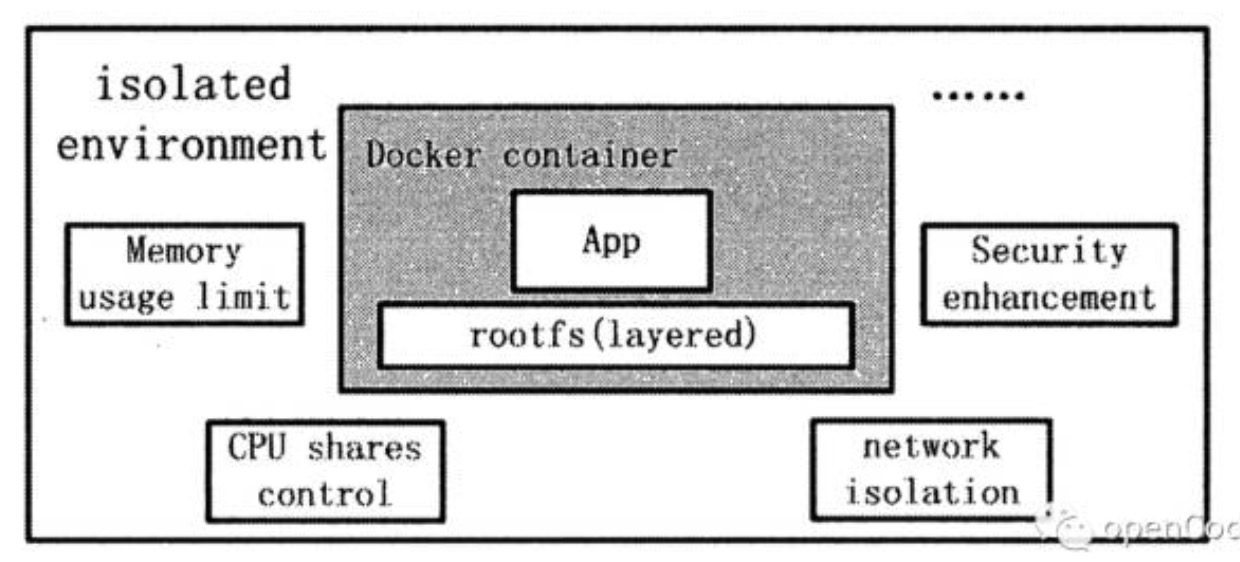
资源限制
上述隔离算是对环境的隔离,以及对linux环境的模拟,在实际使用中还要有对资源的隔离,这时cgroups派上用场,可以对CPU、memory等资源的使用加以限制或控制。
上面讲了可以用来做容器虚拟化的各种系统功能,但是这一切功能在具体实现中都需要一个起点,这个起点就是开启一个新的进程。
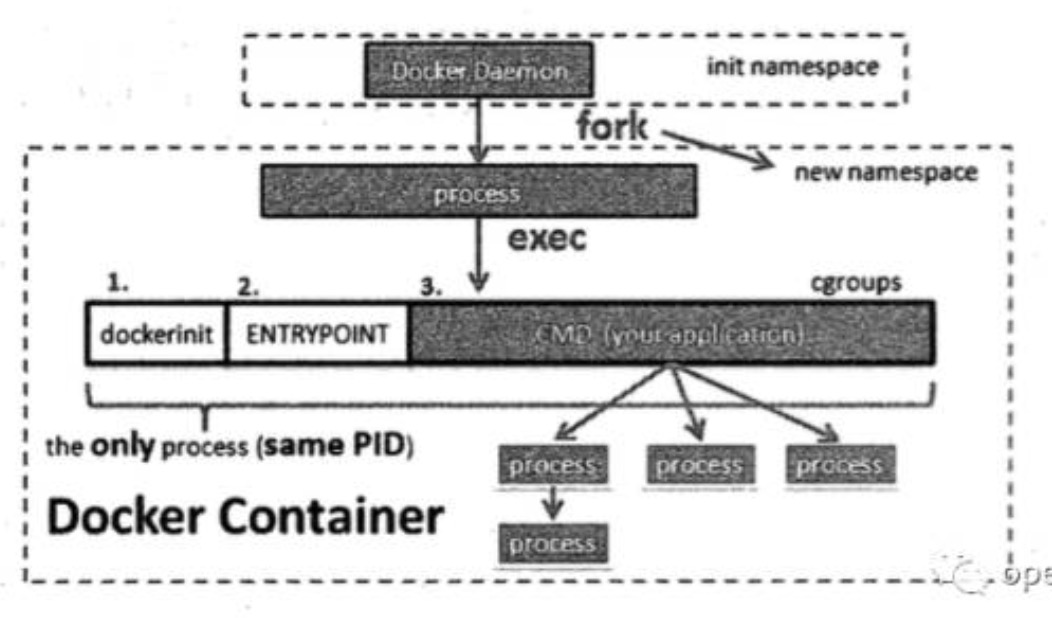
各种namespace的使用在具体代码实现中,都是fork一个新的进程过程中,使用不同的系统调用或选项参数组合,来决定这个新的进程进行哪些环境的隔离。比如说network namespace,可以控制容器启动时可以和宿主机处于同一个network namespace下,这种就是docker的host网络模式,可以宿主机直连。
启动的新进程在docker容器里就是dockerinit进程,该进程做一些初始化工作,使用cgroups对资源使用做限制,或者创建容器的network namespace下的网络设备等等,最后则会执行entrypoint或者用户定义的CMD应用程序(Dockerfile中的CMD)。
如下图,所有的这些工作都是在同一个进程下进行的,一般情况下,一个容器就是一个进程。
参考文章
《Docker源码分析》
https://coolshell.cn/articles/17010.html
https://coolshell.cn/articles/17029.html
https://coolshell.cn/articles/17049.html